


Case studies
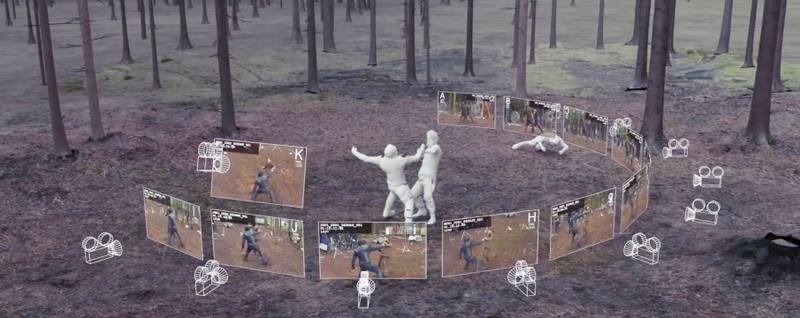
Case study: Volumetric capturing with more than 100 multiple camera setup
Volumetric capture technolgy enhanced through a multi camera system with more than 100 camera units
Read article








