

EPFL logo
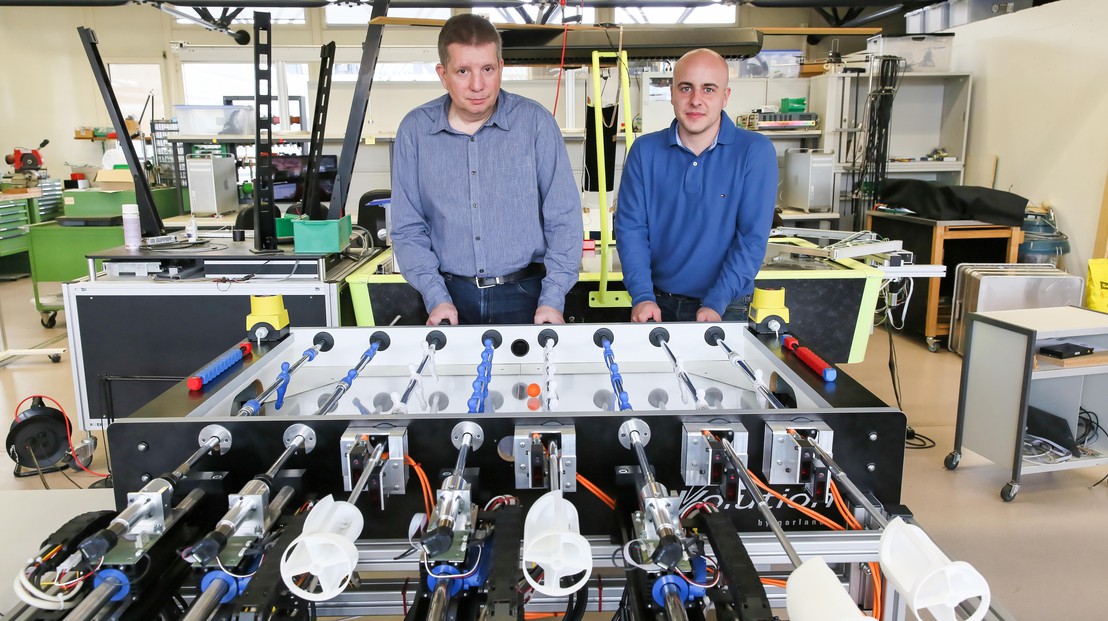
EPFL student and professor playing against the foosball table
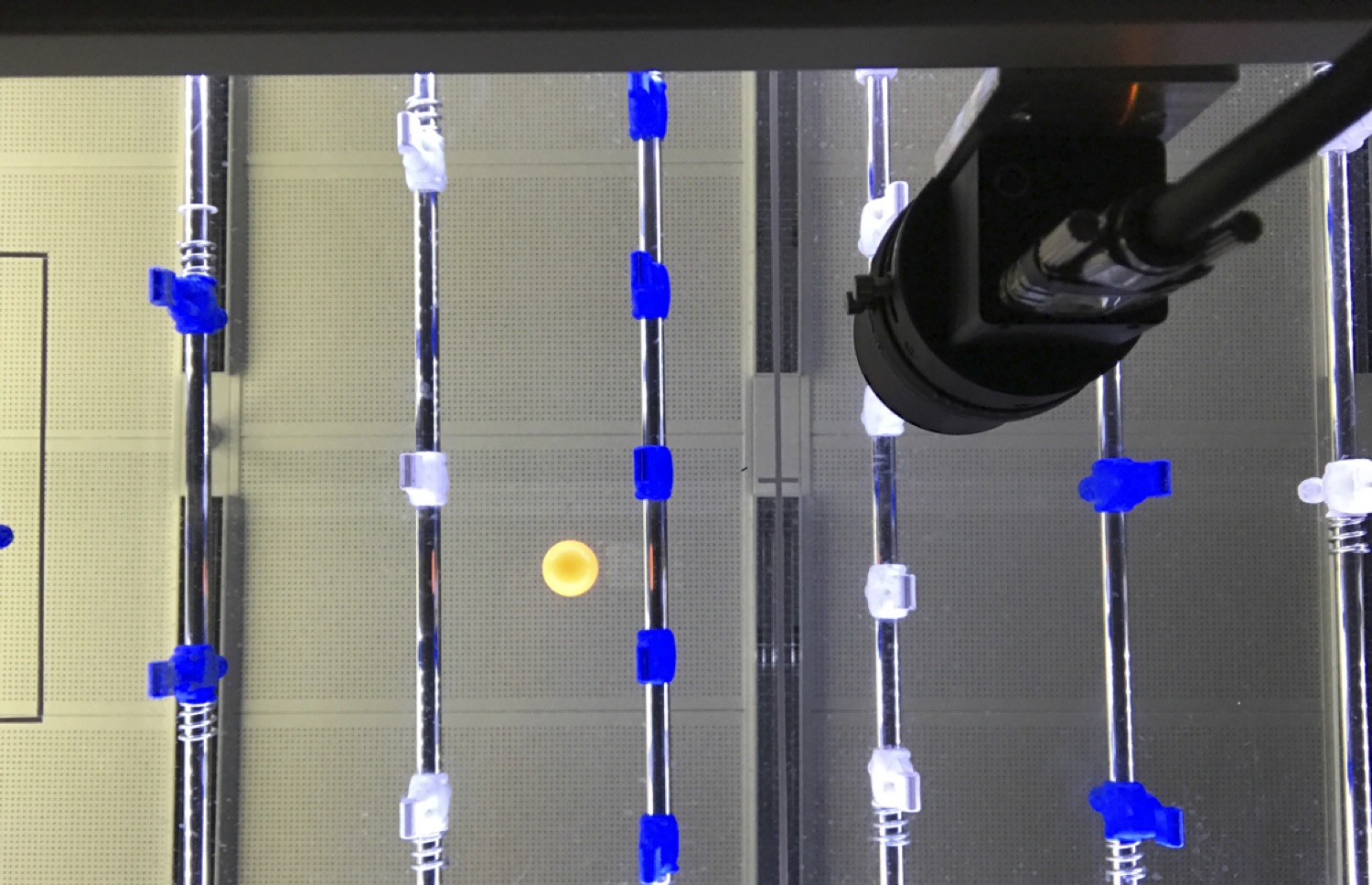
From underneath the table
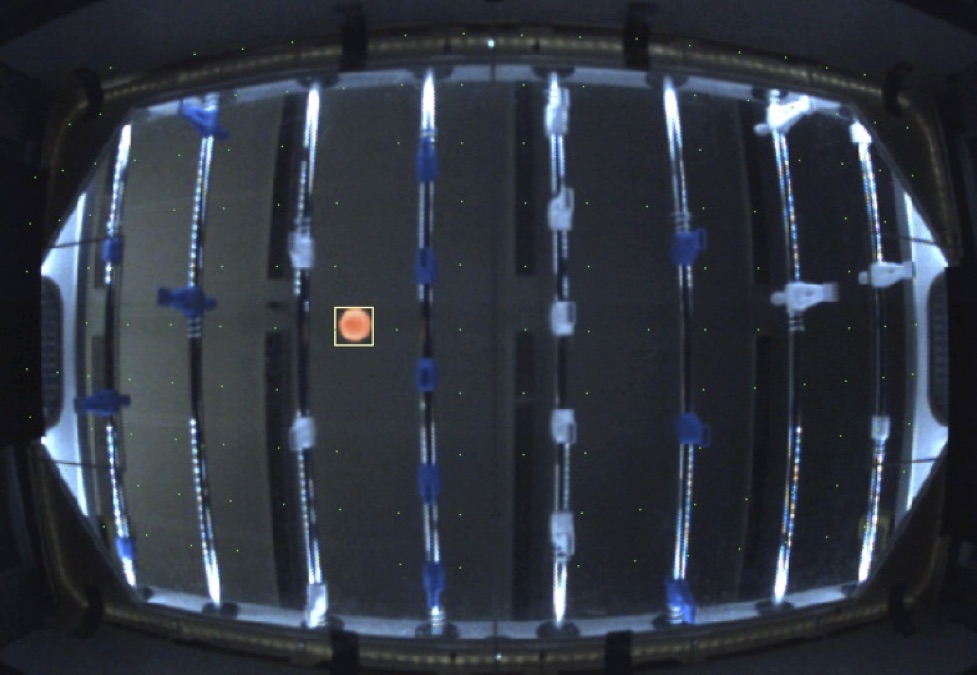
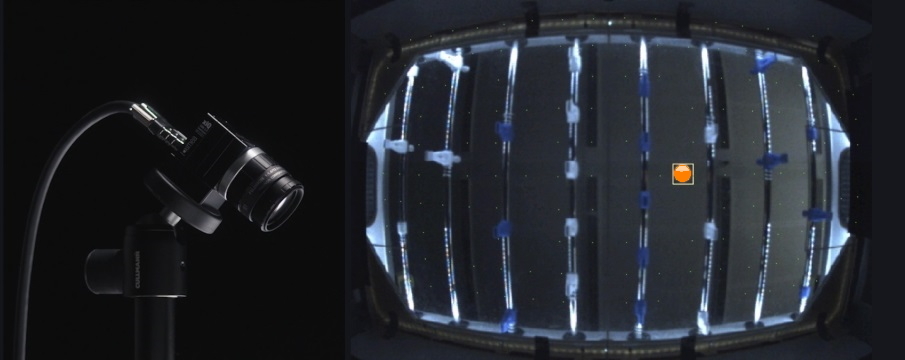
From the camera point of view

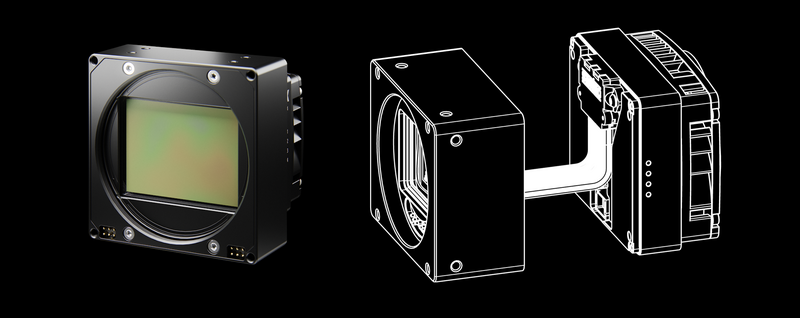
High speed USB3 camera from XIMEA
Related articles
Case studies
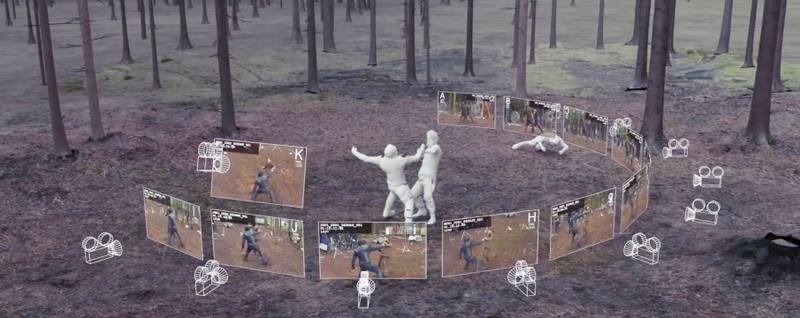
Volumetric capture technolgy enhanced through a multi camera system with more than 100 camera units
Read article

Case studies
Automation of animal observation and training through combining vision and deep-learning
Read article

Case studies
Aurox used specially designed sCMOS cameras from XIMEA to develop an all-in-one microscope
Read article
Latest articles

Exhibitions
Visit XIMEA at booth #A3.312! Explore our updated USB3 and PCIe camera portfolio: super small, incredibly fast, and high-resolution. Our team is ready to showcase them!
Read article

Exhibitions
High-performance BSI sensors, high-speed PCIe interfaces, and a range of other exciting camera innovations.
Join us at booth #3138!
Read article
Join us at booth #3138!


Product news
USB3 and PCIe cameras with 4th generation of Sony sensors like IMX545, IMX546, IMX547
Read article

Exhibitions
High performance BSI sensors, high speed PCIe interfaces and many more exciting camera innovations. Find us at booth #3674.
Read article
