Why is data important in autonomous driving?
Steven Waslander, an associate professor at the University of Toronto Institute for Aerospace Studies in the Faculty of Applied Science & Engineering, and Krzysztof Czarnecki, a professor at the University of Waterloo, lead the team that is compiling the Canadian Adverse Driving Conditions (CADC) dataset.
A collaboration with Scale AI helps them to categorize the data.
“Data is a critical bottleneck in current machine-learning research,” said Alexandr Wang, Scale AI CEO. “Without reliable, high-quality data that captures the reality of driving in winter, it simply won’t be possible to build self-driving systems that work safely in these environments.”
The project has placed the data, documentation and support tools in GitHub.
An open-access scientific article on arXiv explains the data collection process.
The dataset contains 7,000 frames collected through a variety of winter driving conditions.
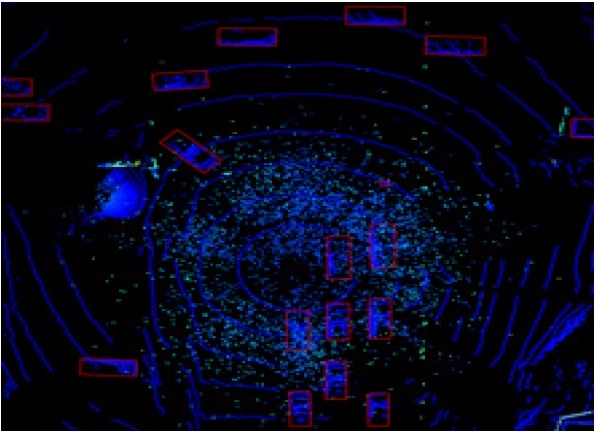
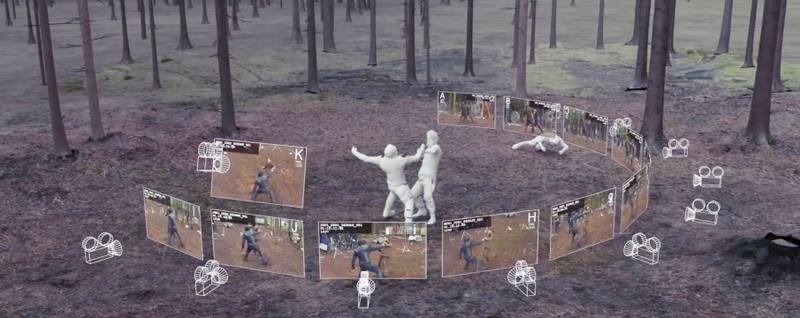
LiDAR frame annotations that represent the ground truth for 3D object detection and tracking have been provided by Scale AI.
“Bad weather is a condition that is going to happen,” said Waslander. “We don’t want Canada to be 10 or 15 years behind simply because conditions can be a bit tougher up here.”