Choose wisely
"To select this critical system component, we compared over a dozen different cameras. We chose XIMEA because of the reliable high frame rates and the compact form factor. We were also very impressed by the easy integration, competitive purchase cost, and the personal, friendly service", said Carrucci.
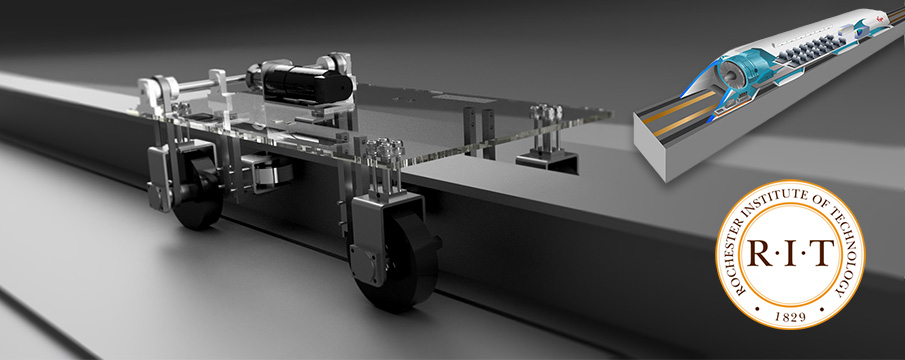
For the Hyperloop MARS (Mechanized Autonomous Rail Scanner) maintenance system, the RIT team is using two MQ003 cameras from xiQ line.
Based on ams CMOSIS CMV300 sensor with 7.4 µm pixel size and 60 dB Dynamic Range, these cameras deliver more than 500 fps in VGA resolution, at 8 bits per pixel.
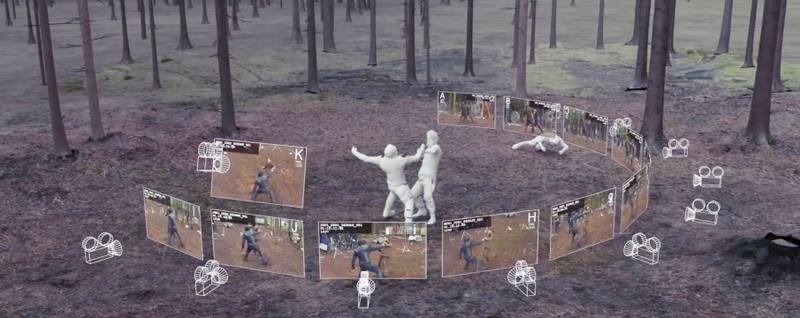
The CMOS Global Shutter technology guarantees a high image quality with no smearing even at high speeds, ensuring precise 3D analysis.
The sensor is combined with 5 Gb/s super-speed USB 3.0 interface that ensures rapid transmission of the images with no frame loss and easy integration.
The data is transmitted uncompressed in real time directly to a computer running fast GPU and FPGA hardware.
All this is embedded in an extremely compact camera housing with C-Mount (or CS) that measures just 26 mm x 26 mm x 24 mm and weighs only 26 g.
Even though XIMEA xiQ cameras consume very little power – mere 1.5 Watts – and generate minimum heat, another Hyperloop partner, responsible for the design of the transport capsules, developed a special camera box/enclosure for it, to compensate for the lack of air-cooling when used in the vacuum of the Hyperloop tubes.