Introduction
Ethology, the detailed analysis of animal behavior, provides important clues about the evolution and function of the underlying brain circuits.
Tracking behaviors in naturalistic environments thus remains a key part of modern neuroscience.
Nevertheless, for many conditions, a simple notebook and binoculars might not be sufficient nor efficient.
Quantitative behavioral analysis is particularly challenging when animals move fast or in complete darkness.
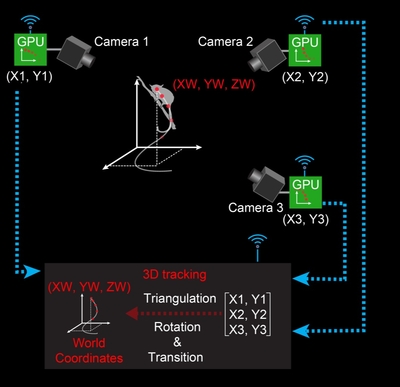
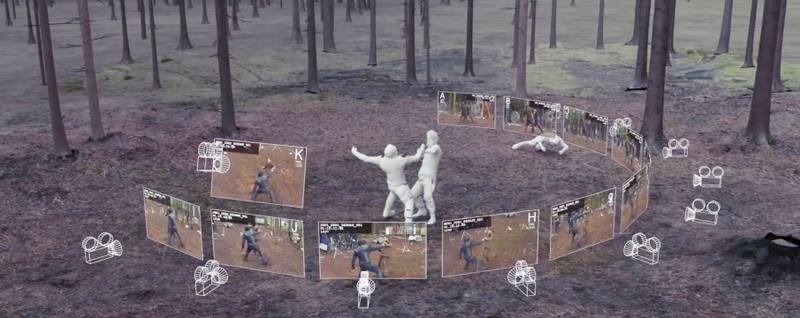
To obtain accurate and reproducible behavioral data from freely roaming animals, Ali Nouri Zonoz, a PhD student in the laboratory of Prof. Daniel Huber at the University of Geneva, developed a novel type of 3D tracking system termed “EthoLoop”.
EthoLoop uses real-time, optical tracking to localize the animals in three dimensions and sends the tracked position to automated gimbal-mounted cameras, thus providing continuous close-up views of the tracked individuals.